Arduino laser za mačke
Gimnazija Matija Antun Reljković
Uz pomoć Arduina, lasera i dva servo motora možemo se vrlo lako igrati s mačkom. Lagano za koristiti te je zabavno za korisnika i za mačku.
Video snimka
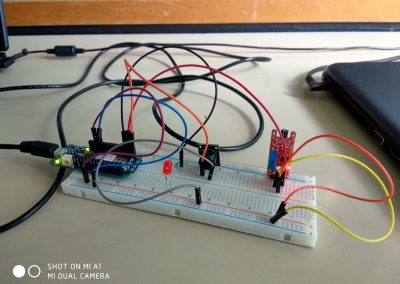
Izrada projekta
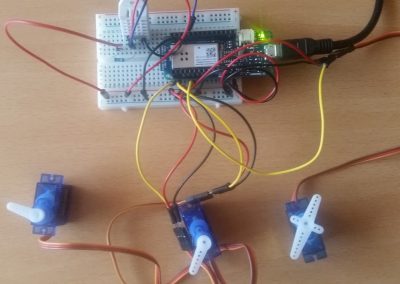
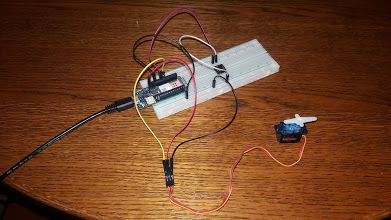
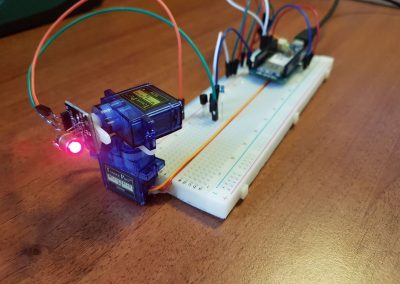
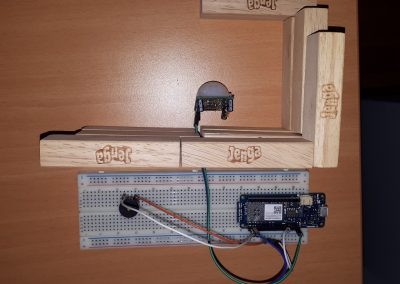
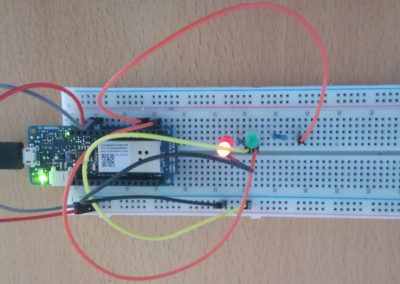
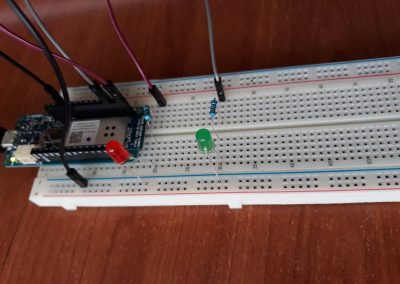
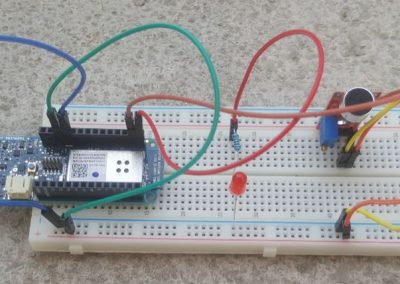
Prvi servo motor je zalijepljen za pločicu dok je drugi servo motor zalijepljen za osovinu prvog servo motora. Te tako uspješno možemo pomicati laser u dvije osi (x,y).


Baza tranzistora je spojena na pin 5, a izlaz tranzistora na laser te tako možemo laser dopremati sa 5V, a ne sa slabih 3,3V od Arduina mkr 1000. Pri naponu od 5V laser puno svjetlije radi i lakše ga ja vidjeti pa čak i po danu.



Mobilna aplikacija
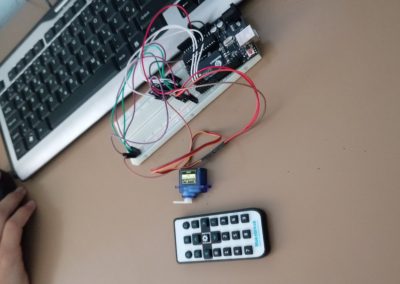
Tipka pali/gasi pin 5 koji je spojen na tranzistor te tako pali/gasi laser. Joystick se koristi za okretanje servo motora. Maksimalna vrijednost joysticka u obje osi je 180 jer servo motori se ne mogu okretati više od 180 stupnjeva.

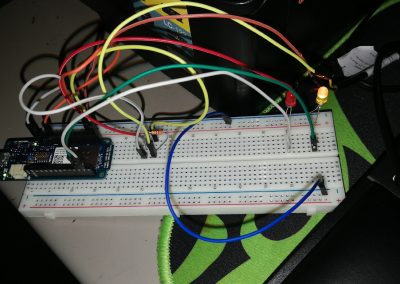
Shema projekta

Servo motori i laser rade na naponu od 5V što im daje veću snagu.
Shemu ovoga projekta možete preuzeti ovdje.
Arduino program
#define BLYNK_PRINT /*
#define BLYNK_PRINT Serial
#include
#include
#include
Servo servo1; //objekt servo1
Servo servo2; //objekt servo2
char auth[]="1ca80e766562403faf36fc4d2edc59cf"; //autentifikacijski kod
char ssid[]="arduinoNetwok"; //ime wifi mreže na koju će se arduino spojiti
char pass[]="x"; //lozinka te iste mreže
BLYNK_WRITE(V0) //obavlja se svaki put kad se virtualna vrijednost V0 promjeni
{
int x = param.asInt(); //integer koji prima arduino od blynk aplikacije
servo1.write(x); //okreće servo1 za x stupnjeva
}
BLYNK_WRITE(V1) //obavlja se svaki put kad se virtualna vrijednost V1 promjeni
{
int y = param.asInt(); //integer koji prima arduino od blynk aplikacije
servo2.write(y); //okreće servo2 za y stupnjeva
}
void setup() //obavlja se samo pri paljenju arduino jednom
{
Blynk.begin(auth, ssid, pass); //započinje komunikaciju sa blynk serverom
servo1.attach(2); //servo1 spaja na pin 2
servo2.attach(3); //servo2 spaja na pin 3
}
void loop() //ponavlja se beskonačno puta sve dok ima napajanje
{
Blynk.run(); //pokreni blynk
}
Arduino program ovoga projekta možete preuzeti ovdje.
Autori
Projekt su izradili Fran Marić i Vittorio Vičević uz mentorstvo Daniela Rakijašića iz Gimnazije Matije Antuna Reljkovića.
Projekt je prijavljen na temu: Internet of Things: Kućni ljubimci i domaće životinje.