Arduino igračka za mačku
Gimnazija Matija Antun Reljković
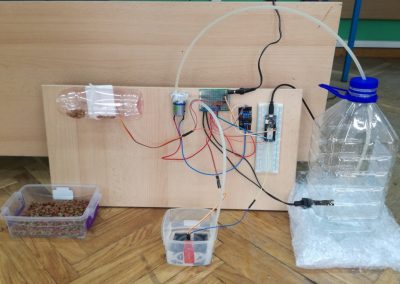
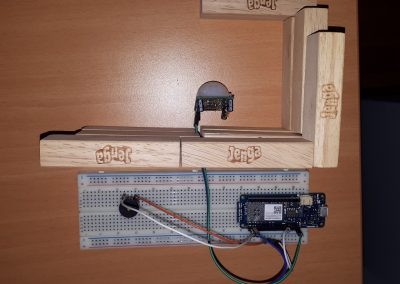
Koristeći samo svoj mobitel i naš Arduino projekt možete zabavljati svoju mačku vrlo lagano. Koristimo servo motor na koji je spojen štapić i na drugom kraju štapića je uže koje je povezano na lopticu za mačke. Klikom na mobitel pomiče se loptica. Dakle ovaj projekt je zapravo za lijene ljude.
Video snimka
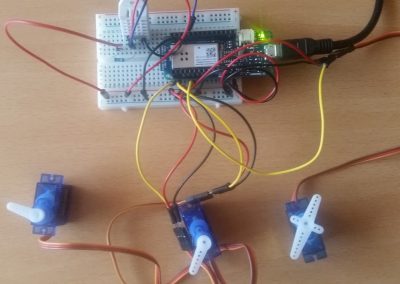
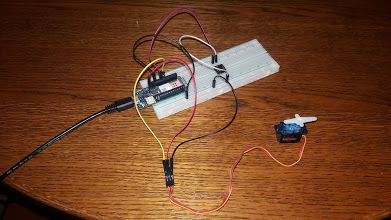
Izrada projekta
Pločica je zalijepljena za ormar da se ne miče i bude stabilnija.





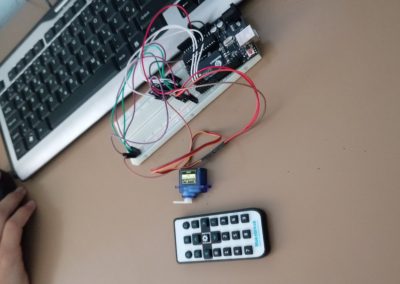
Mobilna aplikacija
Tipka Skoči svojim klikom pomiče servo na 40 stupnjeva te kasnije vraća na 0 stupnjeva. Uz pomoć slidera možemo precizno odrediti kut servo motora. Tipka Automatski se koristi kada smo odsutni ili ne želimo se igrati s mačkom ali svejedno želimo njoj dati neku zanimaciju. S tom tipkom loptica će se pomicati automatski gore/dolje.


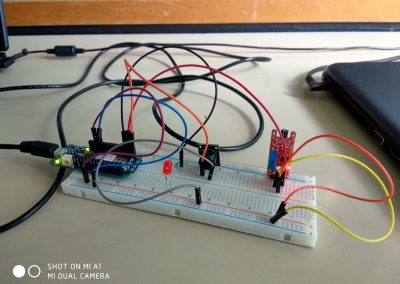
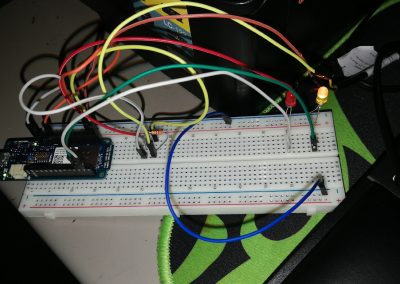
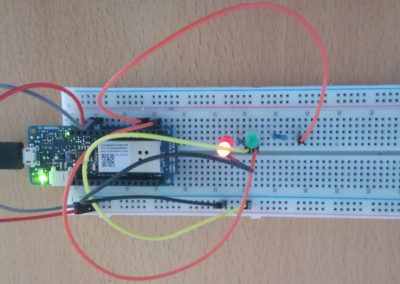
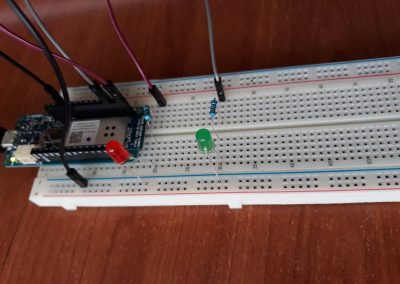
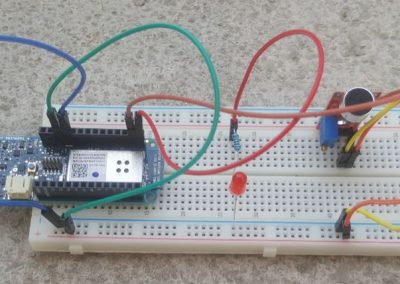
Shema projekta

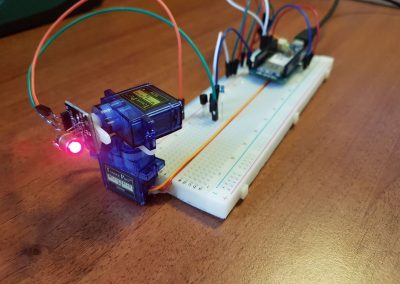
Arduino mkr 1000 upravlja servo motorom. Servo motor je spojen na 5V radi veće snage naspram 3,3V.
Shemu ovoga projekta možete preuzeti ovdje.
Arduino program
#define BLYNK_PRINT /*
#define BLYNK_PRINT Serial
#include
#include
#include
char auth[]="error"; //blynk autentifikacijski kod
char ssid[]="x"; //ime wifi-a na koji će se arduino spojiti
char pass[]="x"; //lozinka istog wifi-a
int motor=8; //pin na koji je spojen servo motor
bool automatski=false;
Servo servo; //objekt servo
BLYNK_WRITE(V2) //tipka za automatski mode
{
automatski=param.asInt(); //pali/gasi bool automatski
}
BLYNK_WRITE(V1) //slider za pokretanje servo motora
{
if(automatski==false)
{
int kut=param.asInt(); //primljenu vrijednost pohrani u varijabli kut
servo.write(kut); //servo motor okreni na kut stupnjeva
}
}
BLYNK_WRITE(V0) //tipka za pokretanje na 40 stupnjeva (skok)
{
if(automatski==false)
{
int kut = param.asInt(); //primljenu vrijednost pohrani u varijabli kut
servo.write(kut); //servo motor okreni na kut stupnjeva
}
}
void setup() {
Blynk.begin(auth, ssid, pass); //započni blynk komunikaciju
servo.attach(motor); //na pin motor(8) postavi kao servo
}
void loop() {
Blynk.run(); //pokreni blynk
if(automatski) //ako je automatski mode uključen
{
servo.write(random(0,40)); //okreni servo motor na nasumični kut između 0 i 40 stupnjeva
}
}
Arduino program ovoga projekta možete preuzeti ovdje.
Autori
Projekt su izradili Fran Marić i Vittorio Vičević uz mentorstvo Daniela Rakijašića iz Gimnazije Matije Antuna Reljkovića.
Projekt je prijavljen na temu: Internet of Things: Kućni ljubimci i domaće životinje.