Sustav autonomnih vozila za rješavanje kriznih situacija - Udruga MIS
Rješavanje kriznih situacija u sustavu autonomnih vozilaIdeja i opis projekta
Autonomna vozila jedna je od “najvrućih” tema u znanstvenim raspravama vezanima uz razvoj kako autoindustrije tako i industrije i tehnologije općenito. Nakon procesa razmišljanja i rasprave na koji način spojiti LittleBits i mBot svijet u domeni zaštite prirode, došli smo na ideju izrade simulacije koja će prikazati sustav upravljanje kriznim situacijama u sustavu autonomnih vozila.
Predviđamo da će se u budućnosti autonomna vozila koristiti za transport proizvoda i sirovina, a ne samo ljudi. Promet ima veliki utjecaj na prirodu, pogotovo kada se radi o upotrebi fosilnih goriva. Gledano s druge strane, štetan učinak je svakako i prijevoz robe štetne za okolinu. Prilikom nesreća na cestama, moru ili zraku štetne tvari mogu onečistiti područja i time znatno oštetiti ekosustav. U takvim situacijama najznačajnija je pravovremena reakcija i poduzimanje postupaka za sanaciju štete.
Naša simulacija prikazuje sustav u kojem vozilo koje je došivjelo nesreću šalje poziv za pomoć kojim se aktivira vozilo za popravak i prevenciju. Vozilo za popravak tada pronalazi pokvareno vozilo i poduzima potrebne akcije.

Popis materijala
LittleBits
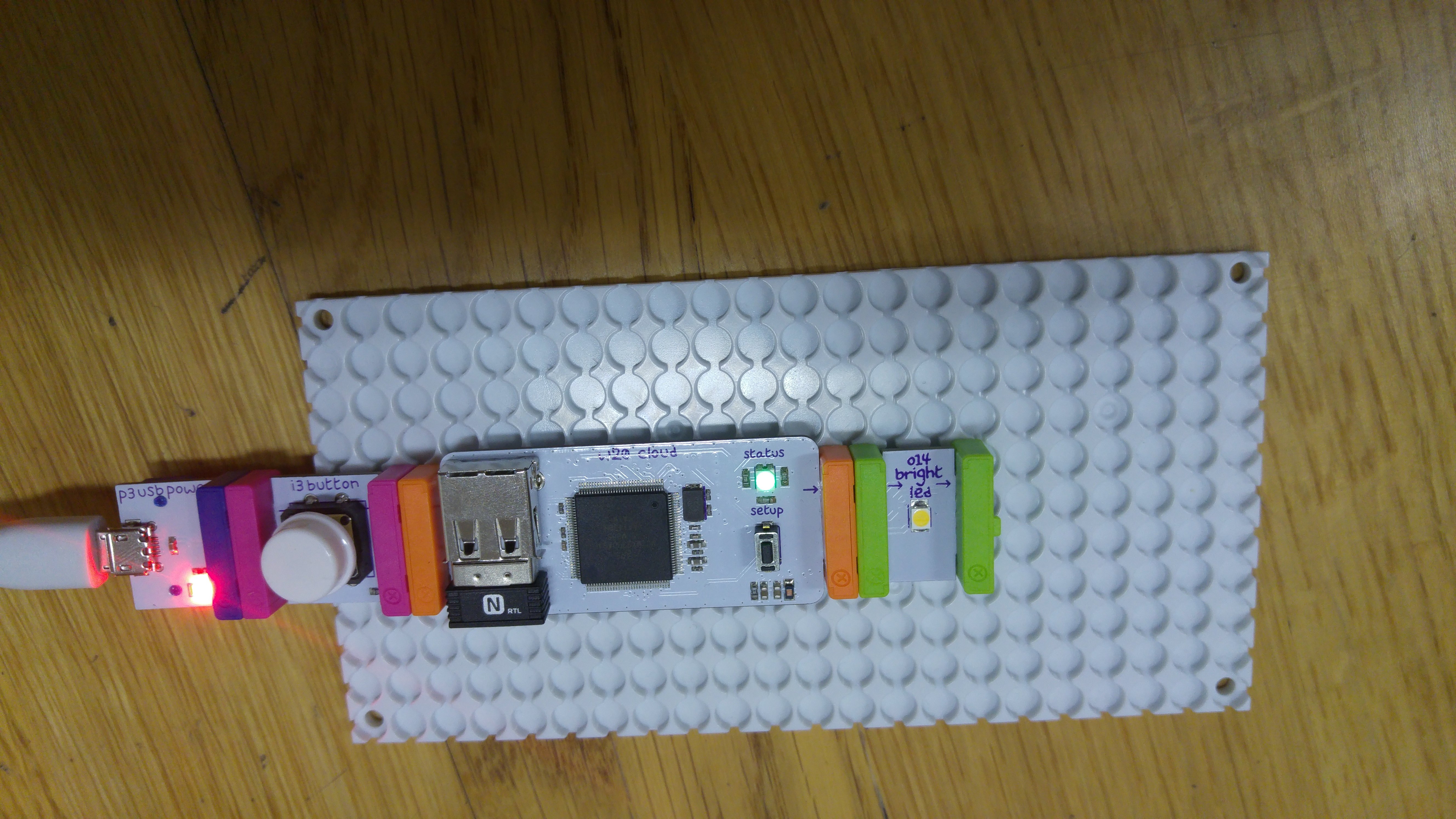
Iz LittleBits kita koristili smo sljedeće module:
- p3 usb power – za napajanje putem usb kabla
- i3 button – za testiranje spajanja sa servisom IFTTT
- w20 cloud – za komunikaciju sa servisom IFTTT
- o14 bright led – za aktivaciju senzora svijetla na mBot-u
mBot
Iz našeg voznog parka mBotova koristili smo 2 mBot robota
- mBot robot kojem je potrebna pomoć
- mBot robot koji dolazi u pomoć

Ostali materijal
Uz navedeno koristili smo i ostale stvari kako bi uspješno izradili simulaciju
- staza za mBot robota
- lego kocke za mBot stanicu
- 2 mobilna uređaja
1. Slanje signala za pomoć
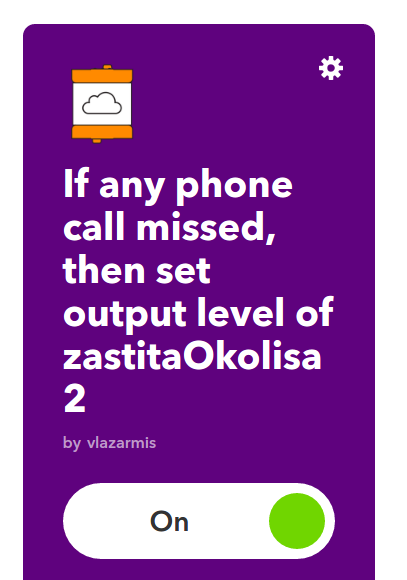
Signal za pomoć simulira se pomoću 2 mobilna uređaja. Jedan od njih je pomoću IFTTT aplikacije povezan na LittleBits sklop. Pravilo za aktiviranje IFTTT recepta je propušten poziv na mobitelu nakon čega se LittleBits sklopu šalje signal koji pali led žarulju. Led žarulja pokrenut će mBot koji očitava vrijednost senzora svijetla čekajući na poziv za pomoć.
2. Pokretanje mBot-a senzorom svijetla
Robot koji je zadužen za primanje pomoći aktivira se pomoću svijetlosti koju stvara led modul LittleBitsa. Kako je vidljivo na slici sa desne strane, nakon aktivacije slijedi praćenje crte. Senzorom za praćenje crte simulirali smo orijentaciju mBota u prostoru koja bi u stvarnosti bila implementirana putem gps-a.
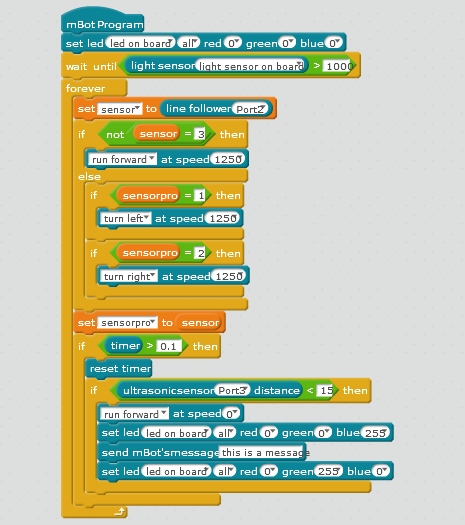
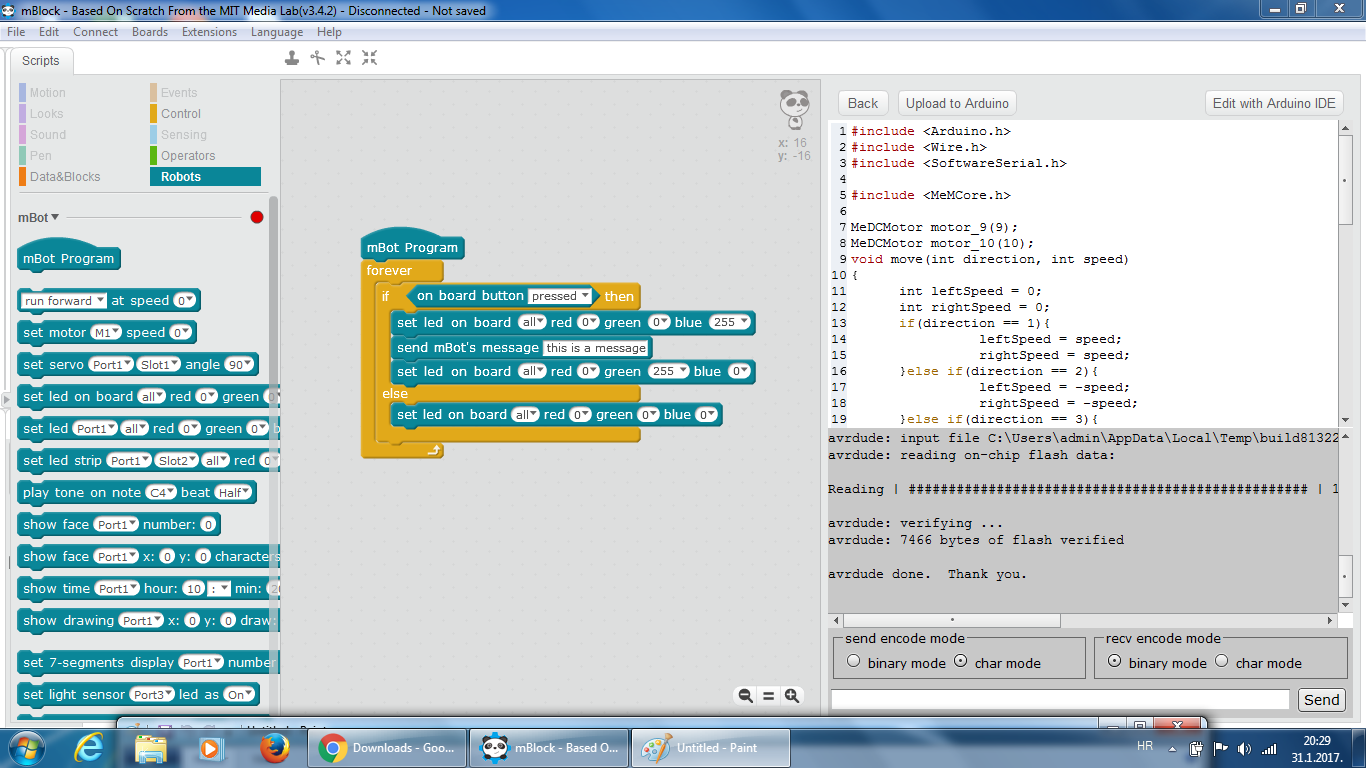
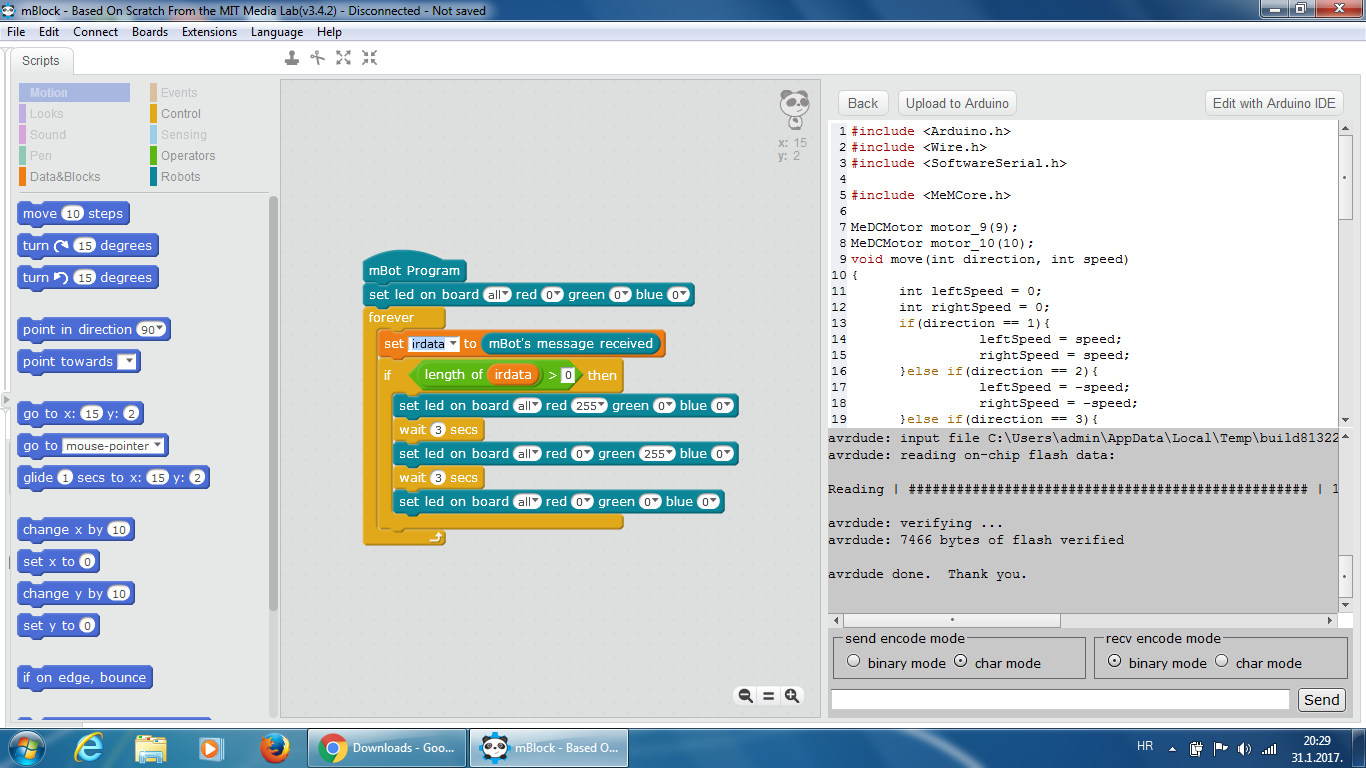
3. Komunikacjia između 2 mBota IR signalom
Komunikacija između mBot robota odvija se putem IR senzora. Na video možete pogledati kako to radi, dok su u nastavku dvije slike programskog koda tj. blokova iz mBlock programa. Prva od njih predstavlja pošiljatelja tj. prikazuje na koji način je moguće odaslati IR poruku. Druga slika prikazuje primatelja i ovdje možete vidjeti na koji način primiti poruku na drugom robotu.
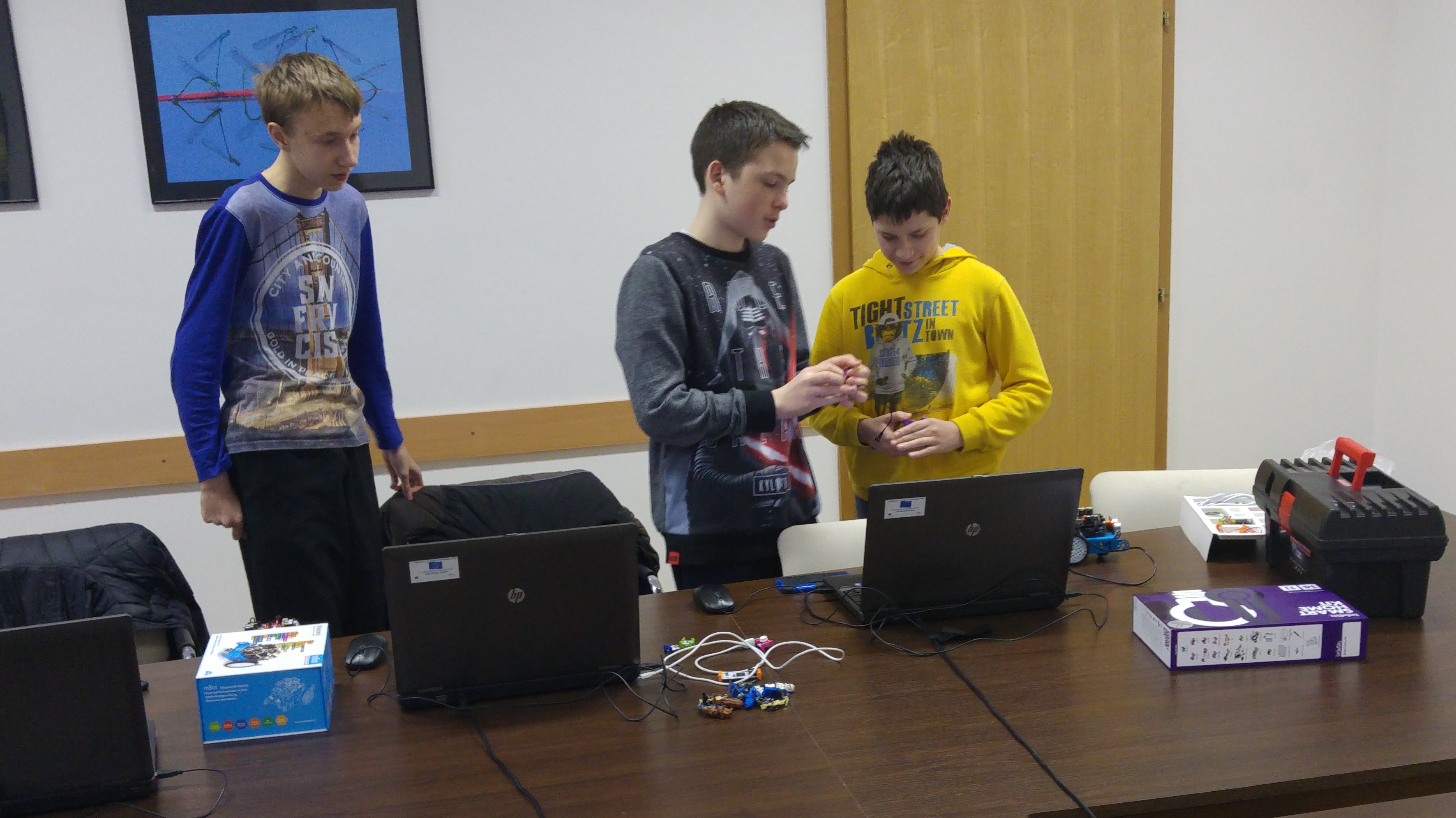
Prikaz rada simulacije
O nama
Članovi Udruge MIS koji su dali ideju i izradili projekt:
- Aleks Florijan
- Matija Bujanić
- Šimun Ćosić
- Vito Jambrošić
Mentor:
- Viktor Lazar, mag. inf.
Za bilo kakva pitanja posjetite nas na www.udruga-mis.hr ili ih pošaljite na vlazar@udruga-mis.hr