Robotika
mBotKomunikacija između robota – uspori i vrati se unatrag
Usporavanje i zaustavljanje kod prepreke
Upravljanje tipkovnicom preko bluetootha
Ispisivanje poruke na LED zaslonu
Provjera vrijednosti svjetlosnog senzora
Show face number – vrijednost svjetlosnog senzora
Show face number – udaljenost od prepreke
Show face character – praćenje crte
Show face number – vrijednost senzora za praćenje linije
Praćenje bijele linije na crnoj podlozi iznutra
Praćenje bijele linije na crnoj podlozi s desne strane
Praćenje bijele linije na crnoj podlozi s lijeve strane
Praćenje crne linije s desne strane
Praćenje crne linije s lijeve strane
Praćenje crte dok ne dođe do prepreke
Obilazak oko stolice uz pomoć ultrazvučnog senzora
Kretanje mBota u pravokutni trokut
Kretanje mBota u jednakostranični trokut
Izmjenično paljenje i gašenje pojedine LED diode
Izmjenično paljenje i gašenje pojedine LED diode do pritiska tipkala
mBot – prati svjetlo
Zadatak
Izradite program kojim će se mBot kretati kad njegov svjetlosni senzor očita određenu razinu svjetlosti.
Rješenje
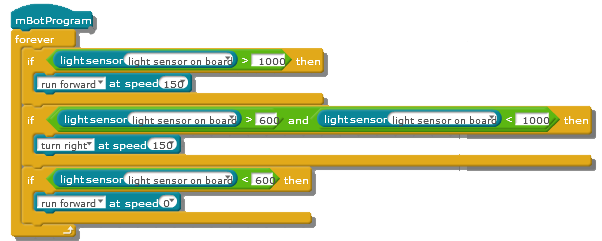
Objašnjenje
U primjeru ovoga koda mBot vozi ravno (run forward at speed 150) ako je izložen velikoj količini svjetlosti (većoj od 1000). Ako je razina svjetlosti koju senzor očitava između vrijednosti 600 i 1000, mBot će se okretati u desnu stranu kao da traži izvor svjetlosti i nastavlja s vožnjom ravno kad senzor očita da je vrijednost svjetlosti veća od 1000. U slučaju da mbot da je razina svjetlosti manja od 600 (light sensor light sensor on board <600), mBot se prestane kretati.