Internet of Things - Arduino
ElektromotoriUpravljanje servo motora pomoću potenciometra
Što ćemo naučiti:
– Koristiti dodatnu biblioteku sa Arduinom i upravljati kretanjem servo motora pomoću potenciometra
Zadatak
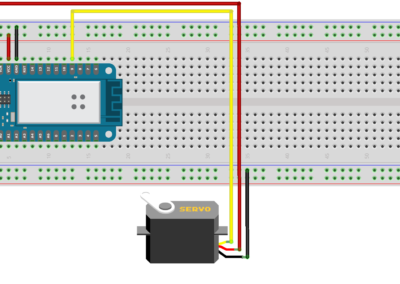
Spojite servo motor na izvod broj (9) Arduina i potenciometar na izvod (A6). Napravite program koji će mijenjati položaj metlice u ovisnosti o položaju potenciometra.
Prikaz spajanja

Arduino kod
#include <Servo.h> Servo motor; // definiranje objekta iz biblioteke int Motor = 9; int Potenciometar = A6; int potenciometar; void setup() { pinMode(Potenciometar, INPUT); //postavi izvod Potenciometar(A6) kao ulazni pinMode(Motor, OUTPUT); //postavi izvod Motor(9) kao izlazni motor.attach(Motor); // postavi object na izvod Motor (9) } void loop() { potenciometar = analogRead(Potenciometar); // oèitava vrijednost potenciometra (0 - 1023) potenciometar = potenciometar / 6; // skalira vrijednosti sa 0-1023 na 0~180 (do 170) - izbjegnut map motor.write(potenciometar); // oeitava vrijednost pozicije motora delay(15); // èeka 15 milisekundi }
verzija 14